Chưa có sản phẩm trong giỏ hàng.
Việc hiệu chỉnh máy in 3D Bambu Lab H2D đảm bảo chất lượng in tối ưu, độ chính xác chuyển động và hiệu suất in 3D. H2D tích hợp các tính năng tự động hóa tiên tiến bao gồm cảm biến dòng điện xoáy và camera hỗ trợ trí tuệ nhân tạo giúp đơn giản hóa quá trình hiệu chỉnh.
Dưới đây là hướng dẫn từng bước để hiệu chỉnh H2D, tập trung vào các quy trình hiệu chỉnh chính như hiệu chỉnh bản in, bù độ lệch vòi phun độ chính xác cao, hiệu chỉnh độ chính xác chuyển động và hiệu chỉnh đùn nhựa.
Trước khi bắt đầu quá trình hiệu chỉnh, hãy đảm bảo rằng bạn đã hoàn thành phần mở hộp và thiết lập máy in trong khóa học dành cho người mới bắt đầu và máy in 3D được đặt trên một bề mặt bằng phẳng, ổn định với đủ không gian.
Quy trình từng bước
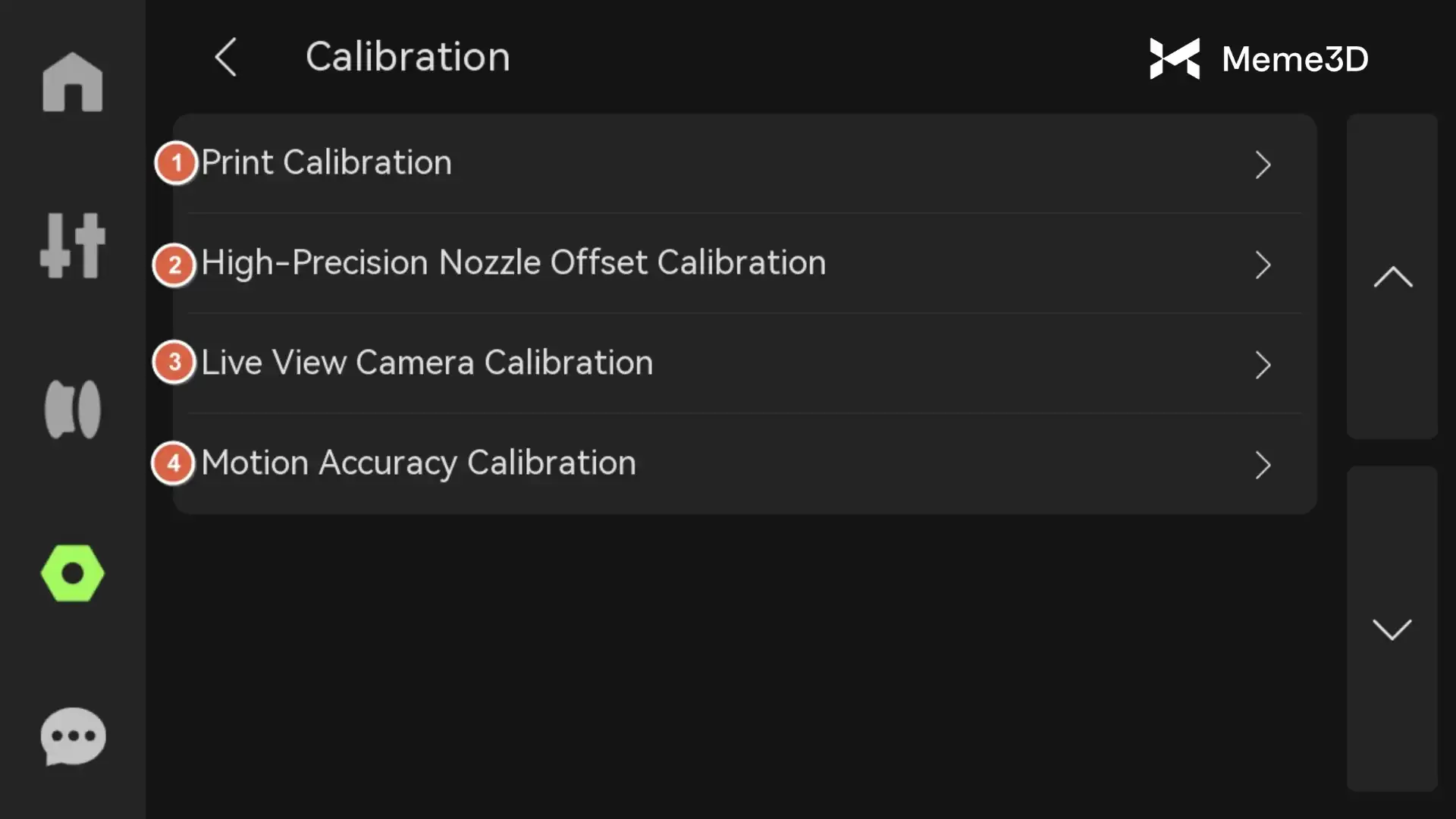
Để truy cập các tùy chọn hiệu chuẩn, hãy điều hướng đến Cài đặt > Hiệu chuẩn . Các tùy chọn hiệu chuẩn sau sẽ được hiển thị.
- Hiệu chỉnh bản in
- Hiệu chỉnh độ lệch vòi phun độ chính xác cao
- Hiệu chỉnh camera xem trực tiếp
- Hiệu chuẩn độ chính xác chuyển động
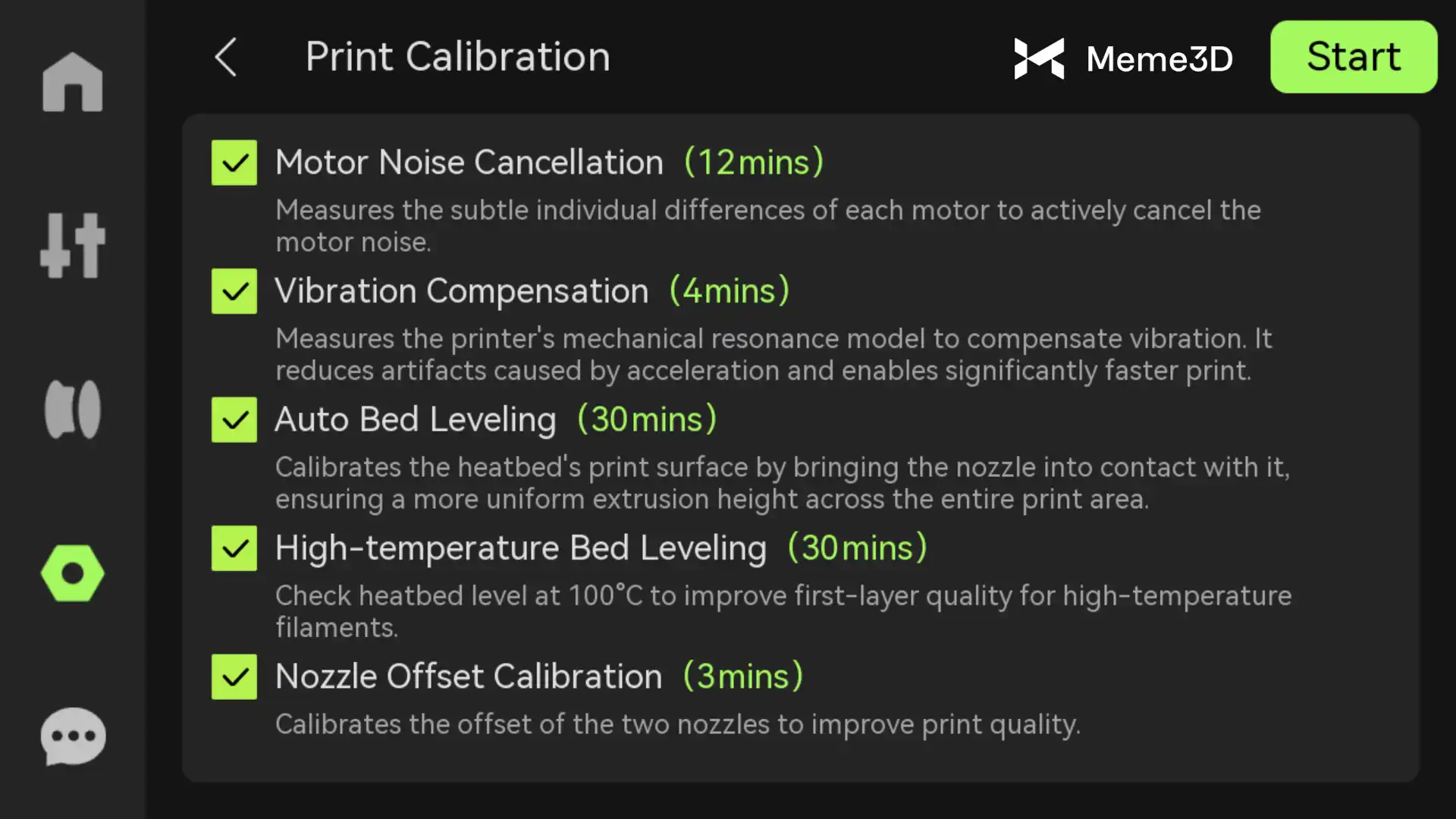
1. Hiệu chỉnh bản in
Tùy chọn này bao gồm khử tiếng ồn động cơ, bù rung, tự động cân bằng bàn in, cân bằng bàn in ở nhiệt độ cao và hiệu chỉnh độ lệch vòi phun.
Lưu ý: Bạn có thể thực hiện tất cả các bước hiệu chuẩn cùng một lúc bằng cách chọn tất cả. Nếu bạn muốn thực hiện một bước hiệu chuẩn riêng lẻ, hãy bỏ chọn các bước còn lại. Toàn bộ quá trình hiệu chuẩn sẽ diễn ra tự động.
- Khử tiếng ồn động cơ: Giảm tiếng ồn do động cơ tạo ra trong quá trình in, đặc biệt khi in trong thời gian dài hoặc ở tốc độ cao. Bằng cách tối ưu hóa thuật toán hoạt động và chiến lược điều khiển của động cơ, công nghệ này không chỉ giảm tiếng ồn mà còn làm cho bề mặt in mịn hơn, từ đó cải thiện hiệu quả in cuối cùng.
- Bù rung: Khi phát hiện bất kỳ rung động nào trong thời gian thực trong quá trình in, vị trí đầu in có thể được tự động điều chỉnh để đảm bảo độ chính xác của bản in. Đặc biệt khi in các mô hình phức tạp hoặc chi tiết, việc hiệu chỉnh này có thể ngăn ngừa hiệu quả các lỗi do rung động gây ra và đảm bảo mỗi lớp được hoàn thành chính xác.
- Tự động cân bằng bàn in: Thông qua các thuật toán thông minh, khoảng cách giữa vòi phun và bàn in được điều chỉnh để đảm bảo khoảng cách ở mỗi góc đều nhất quán, giúp tránh hiệu quả các lỗi in do bàn in không đều và từ đó cải thiện độ chính xác khi in mà không cần điều chỉnh thủ công.
- Cân bằng bàn in ở nhiệt độ cao: Trước khi in bằng các loại sợi in chịu nhiệt cao như ABS/ASA/PC/PA, việc hiệu chỉnh bàn in ở nhiệt độ cao có thể đảm bảo bàn in hoạt động ổn định trong môi trường nhiệt độ cao, giúp ngăn ngừa hiệu quả hiện tượng cong vênh hoặc độ bám dính kém của lớp in đầu tiên, và cải thiện chất lượng bản in lớp đầu tiên.
- Hiệu chỉnh độ lệch vòi phun: Nếu vị trí của hai vòi phun bị lệch, mô hình có thể bị sai lệch hoặc dịch chuyển lớp trong quá trình in. Nếu bạn nhận thấy mô hình bị dịch chuyển lớp rõ rệt sau khi chuyển đổi vòi phun trong quá trình in, bạn nên thực hiện hiệu chỉnh độ lệch vòi phun. Quá trình này sử dụng cảm biến dòng điện xoáy trong đầu in và cảm biến hiệu chỉnh độ lệch vòi phun nằm phía sau bàn nhiệt để đảm bảo độ chính xác của vị trí vòi phun, từ đó cải thiện chất lượng và độ chính xác của bản in. Thông qua hiệu chỉnh hiệu quả, bạn có thể giảm lỗi in và đảm bảo sự căn chỉnh hoàn hảo của từng lớp. Hãy xem wiki về hiệu chỉnh độ lệch vòi phun để tìm hiểu thêm.
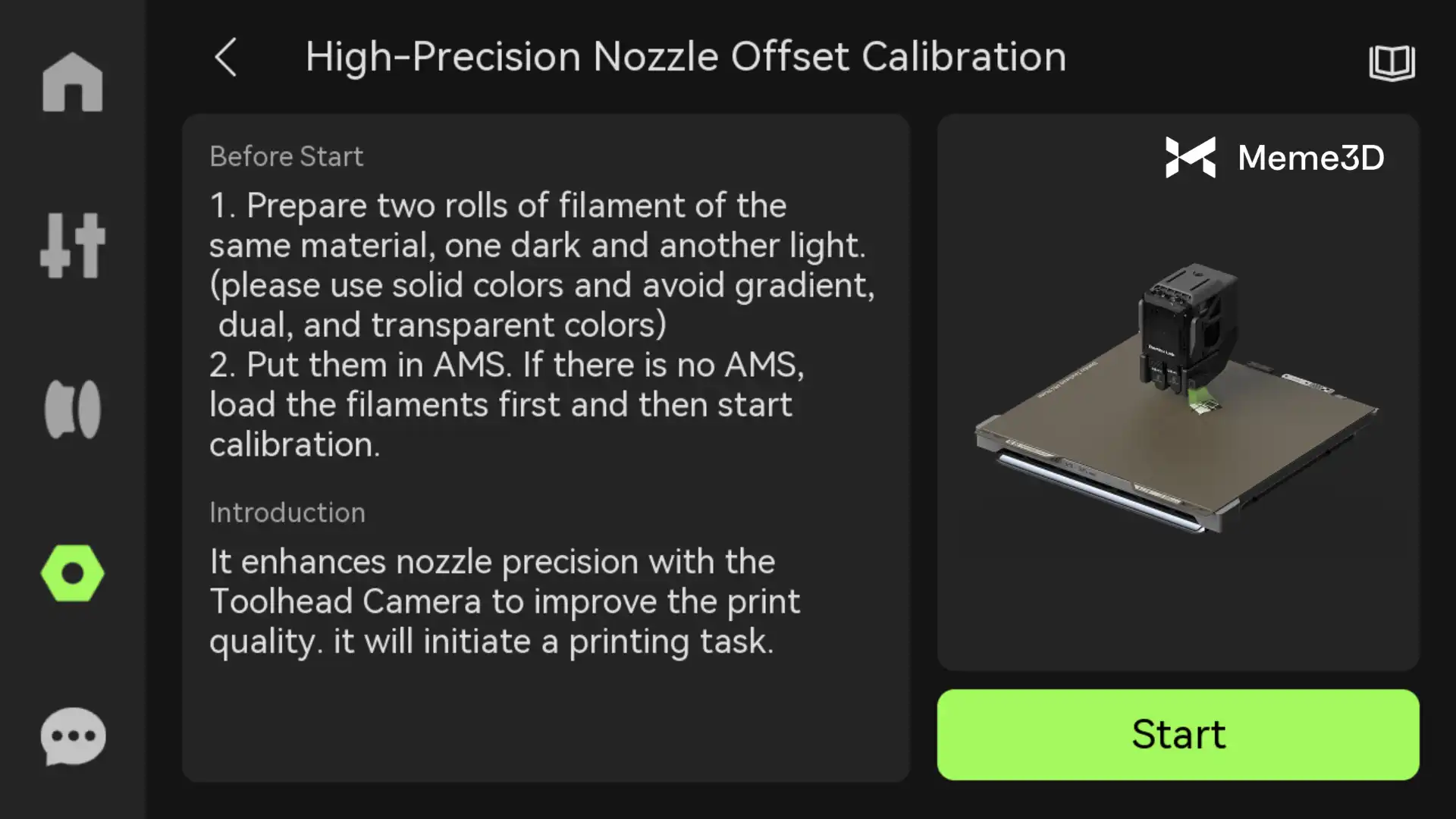
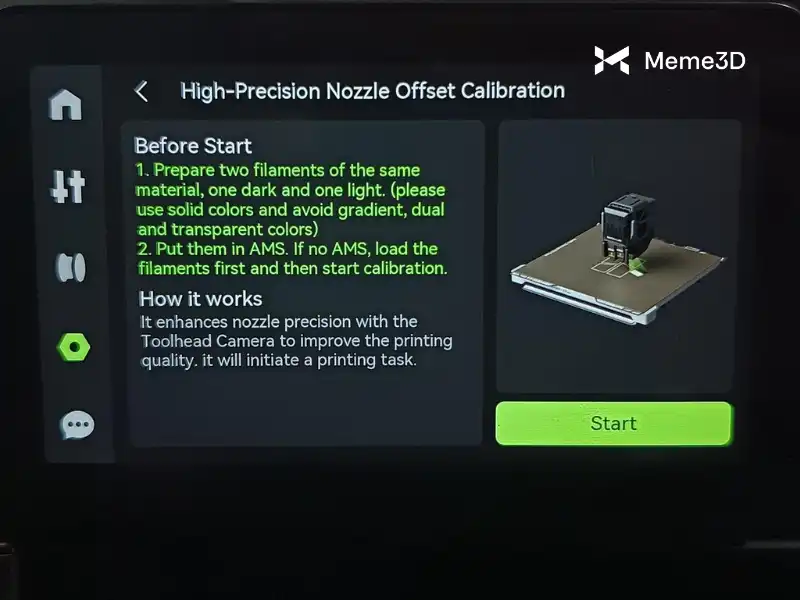
2. Hiệu chỉnh độ lệch vòi phun độ chính xác cao
Tính năng hiệu chuẩn bù lệch vòi phun độ chính xác cao được thiết kế để đảm bảo sự căn chỉnh chính xác của hai vòi phun, tối ưu hóa việc in 3D nhiều vật liệu và nhiều màu sắc. Quá trình hiệu chuẩn này sử dụng công nghệ nhận diện hình ảnh AI để phân tích mô hình thử nghiệm được in với hai loại sợi in, một loại tối màu và một loại sáng màu, được nạp vào các vòi phun tương ứng.
Để thực hiện hiệu chỉnh độ lệch vòi phun với độ chính xác cao, hãy làm theo các bước dưới đây.
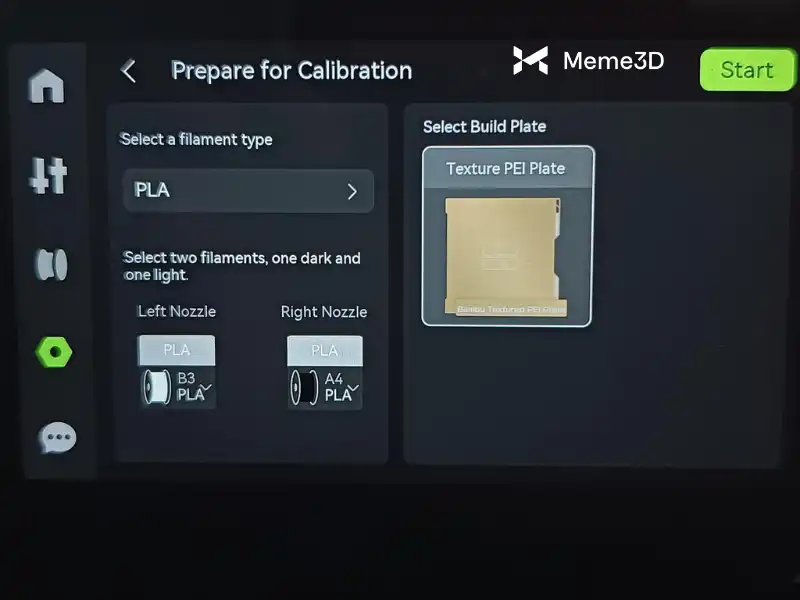
Bước 1: Chọn hai sợi đốt, một sợi tối và một sợi sáng để có độ tương phản tối ưu trong quá trình nhận diện hình ảnh bằng AI.
Nếu sử dụng hệ thống tự động nạp dây filament (AMS), hãy nạp dây filament tối màu vào một khe và dây filament sáng màu vào khe khác, được kết nối với các đầu đùn tương ứng. Nếu không sử dụng AMS, hãy nạp thủ công hai dây filament (tối màu và sáng màu) vào hai vòi phun bằng cách sử dụng cuộn dây filament bên ngoài.
Bước 2: Truy cập cài đặt hiệu chuẩn
- Truy cập trang hiệu chỉnh trên giao diện máy in 3D của bạn.
- Chọn Hiệu chỉnh bù trừ vòi phun độ chính xác cao từ menu.
Bước 3: Bắt đầu hiệu chuẩn
- Nhấp vào nút Bắt đầu trên trang hiệu chuẩn.
- Trên màn hình tiếp theo, hãy xác nhận thông tin đã chọn là chính xác, sau đó nhấp vào Bắt đầu.
Máy in sẽ tự động in một mô hình thử nghiệm trên bàn in bằng cách sử dụng hai sợi nhựa đã được nạp (màu tối và màu sáng).
Mô hình thử nghiệm bao gồm các đường thẳng nằm ngang và dọc được tạo ra bởi hai vòi phun, sau đó sẽ được quét và tự động bù trừ trong phần mềm điều khiển.
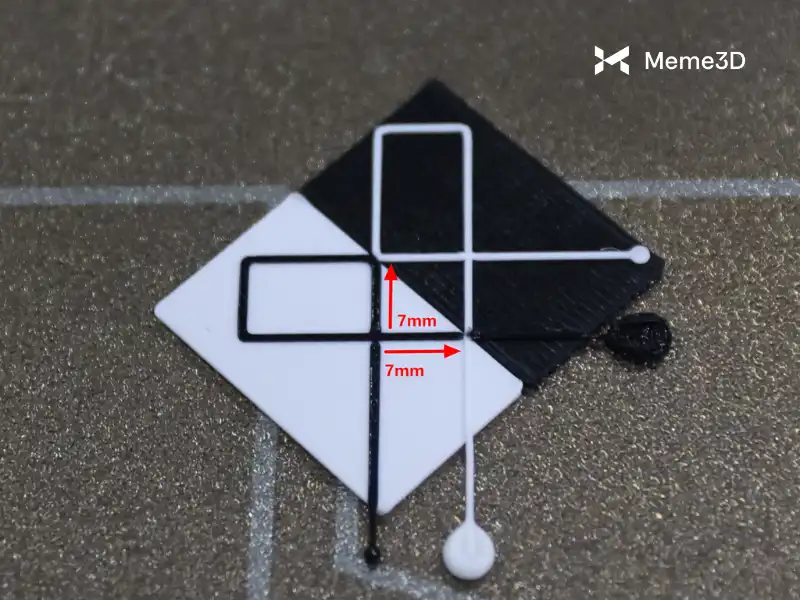
Về mặt lý thuyết, hiệu chuẩn độ lệch vòi phun độ chính xác cao có độ chính xác định vị cao hơn so với hiệu chuẩn độ lệch vòi phun thông thường vì nó tính toán độ lệch trực tiếp từ các dòng in ra từ vòi phun. So với việc sử dụng cảm biến dòng điện xoáy để hiệu chuẩn độ lệch, nó có thể loại bỏ sự nhiễu loạn do các yếu tố khác gây ra.
3. Hiệu chỉnh camera quan sát trực tiếp
Bằng cách xác định các dấu hiệu cụ thể trên bàn nhiệt và hiệu chỉnh vị trí cũng như góc quay của camera trực tiếp, sai số phát hiện do sai lệch góc nhìn và sai số vị trí của camera có thể được giảm thiểu, từ đó cải thiện đáng kể độ chính xác khi phát hiện và đạt được chất lượng hình ảnh cao hơn.
Để hiệu chỉnh camera quan sát trực tiếp, chỉ cần tháo tấm đế ra khỏi bàn nhiệt, sau đó bắt đầu quá trình hiệu chỉnh.
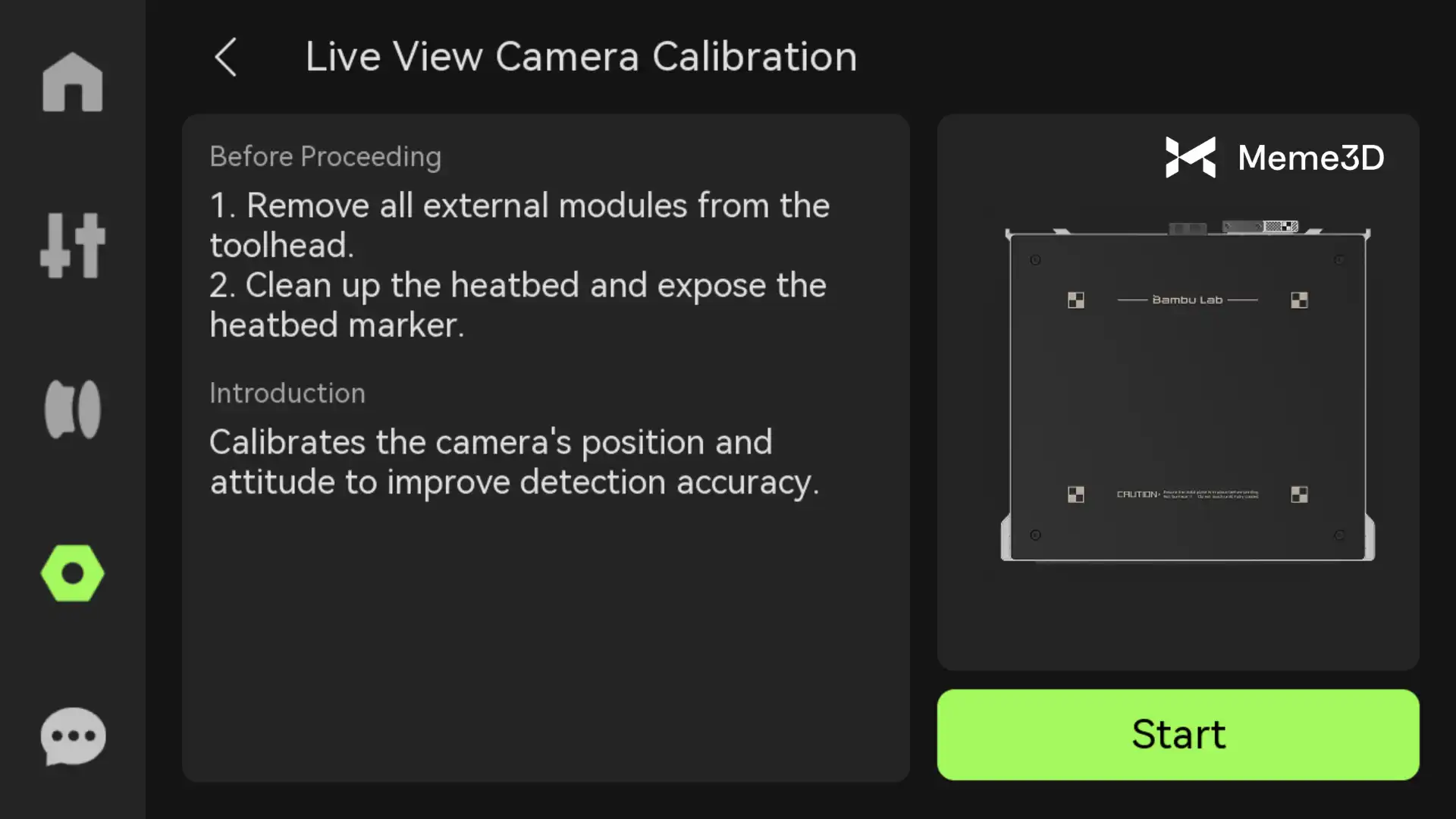
Máy in sẽ tự động đưa trục về vị trí ban đầu, sau đó thực hiện một vài phép đo khác nhau để quét bốn điểm đánh dấu hiệu chuẩn trên bàn in và tự hiệu chuẩn camera quan sát trực tiếp.
Hiệu chuẩn độ chính xác chuyển động
Được thiết kế dành cho người dùng có yêu cầu cao về chất lượng in, phần mềm này nhằm giải quyết vấn đề định vị tuyệt đối trong quy trình in 3D, từ đó cải thiện độ chính xác khi in, đặc biệt là đối với các bản in kích thước lớn. Thông qua quy trình này, hiện tượng trễ chuyển động và biến dạng chuyển động có thể được giảm thiểu đáng kể, đảm bảo độ chính xác cao hơn khi in.
Bộ mã hóa hình ảnh Bambu Lab H2D là một công cụ hiệu chuẩn tiên tiến được thiết kế để nâng cao độ chính xác chuyển động của máy in 3D H2D xuống dưới 50μm, bù đắp cho các sai lệch cơ học và hao mòn theo thời gian. Nó có các phép đo quang học độ phân giải 5μm, được camera đầu in quét trong quá trình hiệu chuẩn. Quá trình này lập bản đồ chuyển động trục XY của máy in, so sánh vị trí đã biết của các điểm đánh dấu với vị trí thực tế của đầu in, cho phép hệ thống điều chỉnh các sai lệch như dây đai bị lỏng hoặc dịch chuyển cấu trúc.
Trước khi bắt đầu hiệu chuẩn, bạn cần đặt một Vision Encoder lên bàn nhiệt. Bạn có thể mua Vision Encoder từ cửa hàng Bambu Lab .
Sau khi đặt Vision Encoder lên bàn nhiệt, hãy nhấp vào Bắt đầu để bắt đầu quá trình hiệu chuẩn.
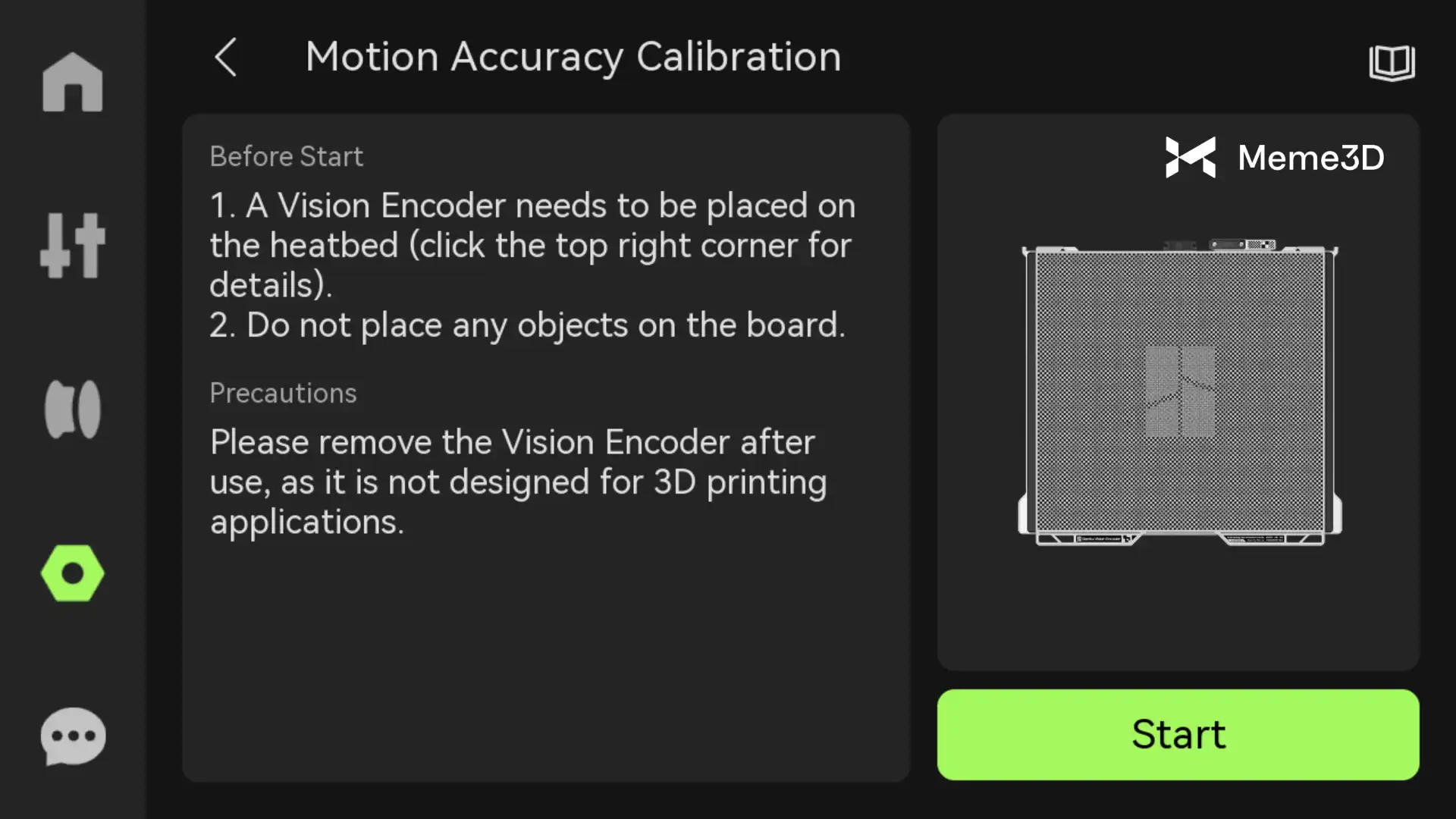
Quá trình này mất khoảng 5 phút, trong thời gian đó camera sẽ quét các điểm đánh dấu, tính toán các điều chỉnh và cập nhật cấu hình chuyển động của máy in.

Sau khi hoàn thành, hãy tháo và cất giữ tấm PEI này, vì nó không phải là bề mặt in có thể sử dụng để in ấn, và lắp lại tấm đế ban đầu.
Để biết thêm thông tin về hiệu chuẩn độ chính xác chuyển động, vui lòng tham khảo: Hiệu chuẩn độ chính xác chuyển động .
Ngoài các tùy chọn hiệu chuẩn nêu trên, hãy xem xét việc hiệu chuẩn cả quá trình đùn, điều này sẽ được đề cập trong một chương khác.
